
- Беспилотные летательные аппараты
- Какими бывают беспилотники, для чего их используют и как устроен дроншеринг? Объясняет специалистка по беспилотным авиационным системам
- Полина Шиманчук
- Что можно прикрепить к летательному аппарату
- Почему обработка полученных данных важнее самого полета
- В чем преимущества беспилотников по сравнению с другими летательными аппаратами
- Как и для чего применяют эту технологию
- Эволюция систем управления беспилотных летательных аппаратов
- Теория и практика БПЛА, или как я учился в Школе дронов МАИ
- День первый. Введение в дроны
- День второй. Базовая аэродинамика, лидары, устройство БПЛА и документы на полет
- День третий. Аэрофотосъемка
Беспилотные летательные аппараты
Время на прочтение

Для начала немного мат. часть
Различают беспилотные летательные аппараты:
* беспилотные неуправляемые
* беспилотные автоматические
* беспилотные дистанционно пилотируемые летательные аппараты (ДПЛА)
Беспилотные летательные аппараты принято делить по таким взаимосвязанным параметрам, как масса, время, дальность и высота полёта. Выделяют следующие классы аппаратов:
* «микро» (условное название) массой до 10 килограммов, временем полёта около 1 часа и высотой до 1 километра,
* «мини» — массой до 50 килограммов, временем полёта несколько часов и высотой до 3 — 5 километров,
* средние («миди») — до 1 000 килограммов, временем 10—12 часов и высотой до 9—10 километров,
* тяжёлые — с высотами полёта до 20 километров и временем полёта 24 часа и более.
Для определения координат и земной скорости современные БПЛА как правило используют спутниковые навигационные приёмники (GPS или ГЛОНАСС). Углы ориентации и перегрузки определяются с использованием гироскопов и акселерометров. Программное обеспечение пишется обычно на языках высокого уровня, таких так Си, Си++, Модула-2, Оберон SA или Ада95. В качестве аппаратного обеспечения как правило используются специализированные вычислители на базе цифровых сигнальных процессоров или компьютеры формата PC/104, MicroPC. Также могут применяться операционные системы реального времени, такие как QNX, VME, VxWorks, XOberon.
И хотелось бы рассмотреть три аналогичных тяжелые ДПЛА X-45, nEUROn и МиГ «Скат»

X-45 — многоцелевой БПЛА. Первый полет выполнил в 2002 году. В ходе первого вылета продолжительностью 14 минут была достигнута высота 2500 м и скорость 360 км в час. X-45A взлетел с авиабазы ВВС США Эдвардс (Калифорния) и приземлился в исследовательском центре НАСА Драйден. Построены две модели Х-45А. Последние полёты этих аппаратов были осуществлены в 2005 году, после которых БПЛА были переданы в музеи.
Пентагон планирует использовать системы, созданные на базе X-45, для решения двух задач:
* подавление системы противовоздушной обороны (как говорят в США, задача первого дня войны);
* нанесение ударов по целям, прикрытым сильной ПВО.
В обоих случаях планируется использовать беспилотники для немедленных действий на удаленных ТВД (заданное время развертывания системы на любом аэродроме планеты — 32 часа, готовность к взлету после переброски — 75 минут). Разрабатывается в двух основных модификациях Х-45С и Х-47В.
* Размах крыла 10.3 м
* Длина 8.08 м
* Масса 3630 кг (пустой), 5528 (максимальная )
* Двигатель Honeywell F124-GA-100 турбинный, либо GE F404-GE-102D турбинный (в зависимости от модификации)
* Максимальная скорость 890 и 1010 км/ч (в зависимости от модификации)
* Практическая дальность 2400 и 1,850км (в зависимости от модификации)
* Потолок 10,670 и 13,720 м (в зависимости от модификации)
* Грузоподъемность 2041кг
Вооружение: 2 x JDAM (905 кг) Joint Direct Attack Munition (JDAM) — комплект оборудования, который преобразует существующие свободнопадающие бомбы («тупые» бомбы, англ. «dumb bombs») во всепогодные корректируемые (англ. «smart») боеприпасы.
nEUROn (Dassault Aviation)

Французский проект постепенно перерос в общеевропейский и получил наименование Нейрон (nEUROn). К нему уже присоединились Швеция, Италия и Испания, решившие использовать собственный опыт по БЛА в интересах общего дела, а также Греция И Швейцария. Нейрон╩ выполняется по концепции, близкой к реализуемой на американских Х-45 и Х-47, но его взлетная масса пока оценивается в 6-8 т. Совсем недавно стало известно, что после прошлогодней потери опытного образца в Германии решено отказаться от дальнейшего развития программы ББЛА Барракуда, дебютировавшего в мае 2006 г. на авиасалоне в Берлине — теперь здесь рассматривают возможность присоединения к общеевропейской программе перспективного боевого беспилотника (скорее всего — к программе Нейрон).
* Размах крыла: 12,5 м
* Длина: 9,5 м
* Масса: 6000 кг
* Скорость 950

Перспективный тяжелый малозаметный боевой БЛА, предназначенный для уничтожения в условиях сильного противодействия зенитных средств противника заранее разведанных стационарных наземных целей, в первую очередь средств ПВО, а также уничтожение мобильных наземных и морских целей при ведении как автономных, так и групповых действии совместно с пилотируемыми летательными аппаратами. Взлет и посадка – по-самолетному. БЛА выполняется по малозаметной схеме «летающее крыло» без хвостового оперения.
* Размах крыла 11.50 м
* Длина 10.25 м
* Масса 8000 кг (пустой), 10000 (максимальная )
* Двигатель РД-5000Б тягой 5040 кгс
* Максимальная скорость 800 км/ч
* Практическая дальность 4000 км
* Потолок 12 км
* Грузоподъемность 2000 кг
Вооружение: две ракеты класса «воздух-поверхность» или противорадиолокационные ракеты (Х-31П); две корректируемые авиационные бомбы калибров 250 и 500 кг.
Х-31П Сверхзвуковая авиационная ракета с пассивной радиолокационной головкой самонаведения предназначена для уничтожения радиолокационных средств управления систем ПВО противника, в том числе РЛС зенитно-ракетных комплексов средней и большой дальности «Patriot», «Improved Hawk», «Nike Hercules» и др.
Какими бывают беспилотники, для чего их используют и как устроен дроншеринг? Объясняет специалистка по беспилотным авиационным системам
В чем разница между разными типами беспилотных летательных аппаратов, почему обработка полученных данных занимает больше времени, чем сам полет, каковы преимущества этой технологии и как ее используют?
На эти вопросы ответила ведущая специалистка Центра технологий беспилотных авиационных систем компании «Газпром нефть» Полина Шиманчук во время своего выступления на международной конференции In the city.
публикует конспект ее выступления. Полную запись дискуссий о новых моделях управления городами, цифровой реальности и других темах можно посмотреть здесь.
— информационный партнер конференции In the city.

Полина Шиманчук
— Давайте зададимся вопросом: что же такое беспилотник и чем он ценен? Первая ассоциация, возникающая, когда люди говорят о беспилотнике, — это те дроны, которые детям дарят на Новый год, чтобы с ними поиграть.
Другая ассоциация: беспилотник — это то, с чего можно снять закат над Петербургом и Москвой. Или сделать красивые фотографии из путешествия. На самом деле всё значительно сложнее и интереснее.
Мы в нашей компании рассматриваем беспилотник как очень большое количество компонентов. Самый первый — это носитель беспилотного воздушного судна, который как раз и вызывает основные ассоциации.
Беспилотники бывают нескольких типов: , самолетного и гибридного типа. Они используются для очень большого спектра задач, каждый беспилотник нужен для чего-то определенного. К примеру, беспилотники мультироторного типа обычно используют, чтобы снять какие-то точечные объекты. Самолетный тип используется в том случае, если мы должны снять большую территорию — например, новый лицензионный участок нашей компании. Гибридный тип объединяет преимущества самолетных и мультироторных аппаратов, его тоже используют для определенных типов работ.
Что можно прикрепить к летательному аппарату
— Следующим компонентом беспилотной авиационной системы является полезная нагрузка. Помимо общепринятых фотокамер и видеокамер на беспилотник можно прикрепить практически всё, что поможет вам решить какую-то задачу. Например, это может быть воздушный лазерный сканер.
Еще одним важным компонентом системы — практически основным — является программное обеспечение. Беспилотник — по сути большой компьютер, которым управляет оператор. У аппарата есть пилот, просто он находится не на борту, и этому пилоту требуется специальная программа. С ее помощью можно настроить беспилотник, управлять им и запрограммировать автоматический полет.
Почему обработка полученных данных важнее самого полета
— Очень важный компонент работы — это обработка данных. Работа беспилотников имеет ценность только в том случае, если мы можем получить, обработать и проанализировать данные.
Каждый беспилотник представляет собой инструмент для оперативного сбора пространственных данных, которые имеют географическую привязку. Фактический полет составляет менее 20 % от общего объема работы.
Остальные 80 % — это обработка, анализ и интерпретация полученных сведений.
В чем преимущества беспилотников по сравнению с другими летательными аппаратами
Еще одно достоинство — оперативность получения нужных сведений. Человек собирает данные значительно дольше беспилотника. Если требуется информация по объекту, мы можем выполнить полет в течение нескольких дней, а еще через несколько дней — получить обработанные данные.
Также существует большое количество полезных нагрузок: на беспилотник можно прикрепить всё что угодно. Беспилотные аппараты не требуют взлетно-посадочной полосы, как в случае с пилотируемой авиацией, поэтому их можно запустить где угодно и использовать как угодно. Курсы операторов сейчас проводят в разных компаниях, и любой может научиться управлять беспилотником, если есть такое желание.
Беспилотник уменьшает трудозатраты на различные виды работ, увеличивает оперативность получения нужных сведений, а также повышает достоверность и объективность полученных данных: аэрофотосъемку невозможно подделать.
Как и для чего применяют эту технологию
— Мы выделили более 80 сценариев применения беспилотников. Это контроль эксплуатации инфраструктуры, мониторинг капитального строительства, съемка местности для обновления , воздушное лазерное сканирование, геофизические съемки, доставка проб нефти, съемка , контроль законсервированных скважин и многие другие сценарии.
Отдельно хочется рассказать о мониторинге инфраструктуры с помощью беспилотников — на сегодняшний день более 70 % трубопроводов в «Газпром нефти» контролируются с помощью беспилотников, что помогает идентифицировать разливы нефти. Если это случается, мы максимально оперативно устраняем разлив и беспилотники здесь являются основными помощниками. Также мониторинг помогает фиксировать отклонения и прогнозировать нарушения, что делает систему максимально устойчивой.
Есть еще дроншеринг, который работает по аналогии с каршерингом. Вы можете взять любой беспилотник, который находится рядом с вами, если нужно выполнить авиационные работы. С помощью специальной системы вы заполняете заявку и выполняете полеты. Пока это работает только для «Газпром нефти» и дочерних компаний, но в перспективе возможно расширение задач системы.
Эволюция систем управления беспилотных летательных аппаратов
Аннотация: в данной статье приведена ТРИЗ-эволюция систем управления беспилотными летательными аппаратами, начиная с первых и заканчивая современными, с их описанием, техническими противоречиями и возможным дальнейшим развитием.
Ключевые слова: система управления, беспилотный летательный аппарат, БПЛА.
Annotation: In this article we present TRIZ-evolution of control systems of unmanned aerial vehicles, that is starting with the original and ending with the modern, with their description, technical contradictions and possible further development.
Keywords: control system, unmanned aerial vehicle, UAV.
В настоящее время беспилотные летательные аппараты (БПЛА) достаточно сильно развиты и имеют широкий круг применений. За век своего существования БПЛА как увеличились в своих размера до десятков метров, так и уменьшились до нескольких миллиметров; их диапазон скорости, грузоподъёмности тоже существенно расширился.
Однако системы управления БПЛА неизменно развивались и продолжают развиваться. Рассмотрим эволюцию систем управления БПЛА, начиная от систем управления первых беспилотных «воздушных торпед» до систем управления современных беспилотников. Для современных БПЛА ограничимся мини и микро классами аппаратов (вес до 30 кг).
Как всегда бывает, первыми БПЛА разрабатывали военные, и только в XXI веке началось активное развитие БПЛА гражданского назначения.
1. Исторически первый БПЛА.
Исторически первым БПЛА считается «Жук» Кеттеринга (см. рис. 1). Это один из первых успешных проектов беспилотного летательного средства. По заказу армии США в 1917 году изобретатель Чарльз Кеттеринг разработал свою экспериментальную беспилотную «воздушную торпеду», которая стала предшественником крылатых ракет. Целью было создать дешёвый и простой беспилотный самолёт-снаряд для армейского авиационного корпуса.

Рисунок 1 – Жук Кеттеринга.
Аппарат получился достаточно компактный, в отличие от «крылатой бомбы» Сперри, разрабатываемой и испытываемой в тоже время. «Жук» имел цилиндрический корпус из дерева, к которому крепилась бипланная V-образная коробка.

Рисунок 2 – Вакуум-пневматический автопилот (пример)
Управление рулём высоты осуществлялось аналогичным образом, но датчиком в этом случае уже являлся барометрический альтиметр.
Перед стартом на беспилотном аппарате задавали значение высоты и максимальное количество оборотов пропеллера, что соответствовало пройденному расстоянию; раскручивали гироскоп. Запуск происходил с рельсовой катапульты, «Жук» выходил на заданную высоту и летел по прямой в сторону цели. Специальное устройство отсчитывало обороты пропеллера и по достижении нужного расстояния (количества оборотов пропеллера сравнялось с заданным), высвобождался пружинный механизм, который отключал двигатель и выбивал болты, держащие крылья. Корпус аппарата падал вниз и достигал цели.

Рисунок 3 – Блок-схема системы управления
У «Жука» Кеттеринга были реализованы простейшие функции автопилота: управление рулём высоты и рулём направления, отсчитывание пройдённого расстояния, отключение двигателя и сброс крыльев. Неудачи в испытаниях были связаны с проблемами удержания аппарата на курсе. Аппарат мог отклониться от курса как при запуске с рельсовой катапульты, так и во время полёта. Кроме того, «воздушная торпеда» под действием ветра могла завалиться на крыло и упасть. Примитивный автопилот хоть и пытался придерживаться курса, но с сильными порывами ветра или ошибкой при запуске справиться не мог.
Представим алгоритм управления «Жука» Кеттеринга:
1) Перед стартом задавались максимальная высота и число оборов пропеллера.
2) Происходил запуск с рельсовой катапульты.
3) Аппарат выходил на заданную высоту (контроль высоты осуществлялся с помощью барометрического альтиметра).
4) Автопилот поддерживал неизменный курс благодаря воздействию гироскопа (полёт представлял собой движение по прямой).
5) При достижении заданного числа оборотов (нужного расстояния), происходило отключение двигателя и сброс крыльев. Корпус аппарата падал вертикально вниз в цель.
Аппарат имел малую дальность и мог двигаться только по прямой из пункта «А» в пункт «Б». Маршрут с большим количеством точек был невыполнимой задачей, как и возвращение аппарата на место старта.
Выявим технические противоречия (ТП), имеющиеся в описываемой системе, для единообразия в формулировках противоречий все рассматриваемы системы будем называть БПЛА:
ТП1. При повышении степени стабилизации БПЛА по крену, путём введения стабилизирующих элементов на крыльях, недопустимо повышается вес аппарата.
ТП2. При повышении степени стабилизации БПЛА по крену, путём введения стабилизирующих элементов на крыльях, недопустимо повышается сложность конструкции.
ТП3. При повышении степени стабилизации по курсу недопустимо уменьшается расстояние до цели.
ТП4. При повышении сложности маршрута недопустимо повышается сложность конструкции.
Противоречие ТП4 было разрешено использованием приёмов вынесения, непрерывности полезного действия, «посредника», путём замены инерциального автопилота на систему радиоуправления. Этап ТРИЗ-эволюции представлен на рисунке 4.

Рисунок 4 – Первый этап эволюции.
2. Новая веха: появление радиоуправляемых летательных аппаратов.
Radioplane OQ-2 представлял собой самолёт-мишень для обучения зенитных расчётов. Длина – 2,65 м. Размах – 3,73 м. Взлётный вес – 47 кг. Максимальная скорость – 137 км/ч. Максимальное время полёта – 1 час.

Рисунок 5 – Внешний вид Radioplane OQ-2
Запуск происходил с катапульты, а управлялась беспилотная радио модель оператором с земли, который мог имитировать различный ситуации (например, заход истребителя для атаки). Если аппарат оставался цел после полёта, посадка происходила с помощью выбрасываемого парашюта и неубираемого шасси (было не у всех моделей), которое смягчало удар о землю. Блок-схема системы управления представления на рисунке 6.

Рисунок 6 – Блок-схема радиоуправления
Радиоуправление позволило беспилотникам следовать по сложным маршрутам и выполнять сложные манёвры в воздухе, превосходя в этом «Жука» Кеттеринга и «Крылатую торпеду» Сперри. Аппараты получили возможность возвращаться на стартовую позицию, что увеличило количество их использования. Малогабаритная конструкция Radioplane OQ-2 и простота позволили развивать ему большие скорости и покрывать большее расстояние. Однако появилась проблема с малым потолком использования в 2438 м.
Аппаратура того времени позволяла эффективно использовать Radioplane OQ-2 только в поле видимости оператора. Именно так оператор с земли мог производить управление беспилотником. Если аппарат вылетал из радиуса видимости, то его можно было контролировать только радаром, что не обеспечивало эффективного наблюдения и снижало точность позиционирования.
При рассмотрении Radioplane OQ-2 можно выявить следующие противоречия:
ТП5. При увеличении дальности, путём увеличения пунктов управления по маршруту движения радиоуправляемого аппарата, недопустимо увеличивается объём наземной аппаратуры управления.
ТП6. При увеличении дальности, путём увеличения пунктов управления по маршруту движения радиоуправляемого аппарата, недопустимо увеличивается количество персонала.
ТП7. При увеличении дальности, путём увеличения объёма топливного бака, недопустимо увеличивается вес.
Второй этап эволюции показан на рисунке 7.
Противоречие ТП7 было разрешено использованием приёмов вынесения, непрерывности полезного действия, «посредника».

Рисунок 7 – Второй этап эволюции
3. Разработки второй мировой войны.
Фау-1 была построена по самолётной схеме, в задней части корпуса над рулём курса крепился реактивный двигатель. В процессе разработки проекта появилась необходимость ввести стабилизаторы и гироскоп для стабилизации аппарата во время полёта.

Рисунок 8 – Внешний вид Фау-1
Автопилот был пневматическим устройством, работающим на сжатом воздухе. Золотники пневматических машинок рулей курса и высоты приводились в действие воздушным давлением, в зависимости от показаний гироскопов. Сами гироскопы раскручивались также сжатым воздухом. Расстояние полёта задавалось на специальный механический счётчик, а прикреплённый на нос снаряда анемометр постепенно сводил значение к нулю. По достижении нулевого значения происходило разблокирование ударных взрывателей и отключение двигателя. Примерна блок-схема показана на рисунке 9.
Длина – 7.75 м. Размах крыльев – 5,3 (5,7) м. Максимальная скорость – 656 км/ч (по мере расходования топлива скорость доходила до 800 км/ч). Дальность доходила до 280 км.
Фау-1 могла летать только по прямой (как «Жук» Кеттеринга), однако покрывала большее расстояние и развивала гораздо большую скорость.

Рисунок 9 – Блок-схема системы управления.
После рассмотрения Фау-1 были выделены следующие технические противоречия:
ТП8. При упрощении процесса старта, путём отказа от катапульты, недопустимо увеличивается сложность конструкции.
ТП9. При увеличении сложности маршрута недопустимо увеличивается сложность оборудования.
ТП10. При увеличении сложности маршрута недопустимо увеличивается вес аппарата.
На основе вышеописанных противоречий выделен второй этап ТРИЗ-эволюции беспилотных летательных аппаратов (рис. 10).
Противоречия ТП8 и ТП9 были разрешены с помощью приёмов вынесения, непрерывности полезного действия, «посредника», путём замены самолётной схемы на вертолётную.

Рисунок 10 – Третий этап эволюции.
4. Противолодочный вертолёт.

Рисунок 11 – Внешний вид Gyrodyne QH-50 DASH
В отличие от предыдущих систем, аппарату не требовалась взлётная полоса или оборудование (например, катапульта), а требовалась небольшая ровная поверхность.
Беспилотный вертолёт разрабатывался для старта с палубы корабля. Перед запуском к нему подвешивали торпеды.
Контроль управления вёлся с пульта оператора (блок-схема системы управления представлена на рис. 12). На пульт также приходили данные о состоянии аппарата, сигналы оружейной системы. В дальнейшем было предложено ввести два пульта управления. По требованию, один пульт должен был находиться на палубе, а другой в командном пункте.
Так как торпеды весили много, пришлось отказаться от телеаппаратуры. Поэтому запускали сразу два вертолёта: один с аппаратом обнаружения и целеуказания; второй с вооружением.
Проект Gyrodyne QH-50 DASH был отменён из-за несовершенства системы управления и конструктивных дефектов, почти половина аппаратов разбились. Во время полёта у беспилотного вертолёта могло произойти самопроизвольное отключение аппаратуры управления. Также сказалось начало войны во Вьетнаме. Но использование беспилотного вертолёта вплоть до 2006 года как учебное пособие, объект экспериментов и т.д.

Рисунок 12 – Блок-схема системы управления.
Выделим противоречия беспилотного вертолёта Gyrodyne QH-50 DASH:
ТП11. При уменьшении габаритов беспилотного аппарата недопустимо уменьшается показатель полезной нагрузки.
ТП12. При уменьшении габаритов беспилотного аппарата недопустимо уменьшается дальность полёта.
Противоречия ТП10 и ТП11 были разрешены с помощью приёмов вынесения, объединения, универсальности, замены механической схемы, путём создания доступных контроллеров полёта для авиамоделистов.
По этим противоречиям составим этап ТРИЗ-эволюции (рис. 13).

Рисунок 13 – Четвёртый этап эволюции.
5. «Беспилотники» в массы. Полётные контроллеры для моделирования.
В наше время беспилотные летательные аппараты перестали быть военными «игрушками». В начале XXI века всё больше и больше различных БПЛА находят применение в гражданских сферах: аэросъёмка, доставка грузов, отдых и досуг, образование и др. Появилось множество схем конструкций (мультикоптеры, самолётного типа и др.). Теперь их можно спокойно купить в магазинах или даже сделать самому при покупке определённых комплектующих. О них и пойдёт речь далее.
Полётный контроллер – это основная плата управления, обеспечивающая функционирование беспилотного летательного аппарата.
Одним из первых популярных полётных контроллеров XXI века был MultiWii (рис. 14). Это открытый проект полётного контроллера на основе Arduino (аппаратной вычислительной платформе, основными компонентами которой являются простая плата ввода/вывода и среда разработки на языке Processing/Wirin (Си подобный)). Используется как элемент системы управления самодельных беспилотных аппаратов (в частности для мультикоптеров). Название MultiWii исторически сложилось потому, что в первых версиях были задействованы гироскопы из контроллера к игровой консоли Nintendo Wii.

Рисунок 14 – Внешний вид платы MultiWii
В данный момент платформа поддерживает большое количество сенсоров. Изначально нужно было докупать гироскопы из контроллера Wii Motion Plus и акселерометр из контроллера Wii Nunchuk, однако сейчас этого делать не нужно.
Так как основой проекта служит Arduino, то подключаемые модули (GPS, радио передатчик и т.д.) совместимо с проектом полётного контроллера ArduPilot (подробнее о нём поговорим ниже). По своей сути это плата с контактами, а не готовая система управления, к которой радиолюбитель может присоединять различные модули (в соответствии с нужными целями). Есть возможность настроить управление по радио пульту (с помощью приемника/передатчика радиосвязи) либо простые функции автопилота, такие как движение по точкам (необходим модуль GPS) и удержание курса (магнитометр). Естественно всё это возможно только при правильной настройке контроллера.
Изначально на плате был 8-битный микроконтроллер ATMega328 (тактовая частота до 20MHz, FLASH-память 32кб, SRAM-память 2кб), либо ATMega2560 (тактовая частота 16MHz, FLASH-память 256кб, SRAM-память 8кб). Но, т. к. проект является открытым, появились любительские версии с 32-битным STM32. Так же присутствуют встроенные датчики MPU6050 (3-осевой гироскоп и 3-осевой акселерометр), BMP085 (барометр) и HMC5883L (электронный магнитный компас). Информация представлена в общем виде и может отличаться для различных версий плат.
На рисунке 15 показана блок-схема системы управления.
Предполагаемый алгоритм управления:
1) Необходимо подключить все необходимые для задачи пользователя модули, предварительно записав программу в микроконтроллер (официальную или самодельную).
2) Далее следует подключить полётный контроллер к питанию и включить.
3) В зависимости от конструкции беспилотного аппарата, следует произвести запуск.
Полётные контроллеры в основном предназначались для радиоуправления. Хоть они и поддерживали некоторые функции автопилота, оператору приходилось контролировать полёт. Например, двигаясь по точкам маршрута, летающий аппарата может врезаться в возникшее препятствие, если не будет принято своевременных мер. Это относится и к остальным моделям полётных контроллеров, описанных ниже.

Рисунок 15 – Блок-схема системы управления.
В системе выявлены следующие противоречия:
ТП13. При повышении гибкости настройки управления контроллера недопустимо повышается сложность кода.
ТП14. При повышении гибкости настройки управления контроллера недопустимо повышается количество часов, требуемых на это.
Противоречия ТП13 и ТП14 были разрешены с помощью приёмов вынесения, объединения, универсальности, замены механической схемы.
Этап эволюции показан на рисунке 16.

Рисунок 16 – Пятый этап эволюции.
6. Новые аналоги.
Контроллер CopterControl3D (CC3D) создан в рамках открытого проекта Open Pilot,начатого в 2009 году (рис. 17). Как и MultiWii является небольшой и относительно дешевой программируемой платой, но в отличие от неё разрабатывался специально для квадрокоптеров. Так же получил своё программное обеспечение OpenPilot GCS для настройки. Примерно 90% квадрокоптеров используемых для управления First Person Viev (FPV, вид от первого лица – управление осуществляется не только по радио каналу, но и по дополнительному каналу принимается на экран видео в реальном времени) собираются любителями именно на этом контроллере.

Рисунок 17 – Внешний вид платы CC3D
На плате присутствует 32-битный микроконтроллер STM32F103 72MHz с FLASH-памятью 128кб и чип MPU6000 (совмещает 3-осевой гироскоп и 3-осевой акселерометр).
Блок-схема системы управления показана на рисунке 18 (отличия только в интерфейсах подключения устройств).

Рисунок 18 – Блок-схема системы управления
ТП15. При повышении гибкости управления контроллера, путём добавления функций автопилота, недопустимо повышается сложность кода.
ТП16. При повышении универсальности использования контроллера недопустимо повышается сложность кода.
Противоречия ТП15 и ТП16 были разрешены с помощью приёмов вынесения, универсальности, самообслуживания, «посредника».
Этап эволюции представлен на рисунке 19.

Рисунок 19 – Шестой этап эволюции
7. Решение от Arduino.
Полётный контроллер ArduPilot Mega (рис. 20), разработанный компанией Arduino. Главным отличием от предыдущих является поддержка не только летающих беспилотных аппаратов, но наземных и лодочных систем. Так же помимо радиоуправляемого дистанционного пилотирования – автоматическое управление по заранее созданному маршруту, т.е. полет по точкам, а так же обладает возможностью двухсторонней передачей телеметрических данных с борта на наземную станцию (телефон, планшет, ноутбук и т.д.) и ведение журнала во встроенную память.

Рисунок 20 – Внешний вид платы
Контроллер поддерживает программирование, как и прочие продукты Arduino, язык программирования Arduino (является стандартным C++ с некоторыми особенностями). При грамотной настройке позволяет превратить любой аппарат в автономное средство и эффективно использовать его не только в развлекательных целях, но и для выполнения профессиональных проектов. По сравнению с вышеописанными платами более стабильно ведёт себя во время полёта, может неплохо выполнять некоторые фигуры полёта.
Контроллер поддерживает авиасимулятор через ПО Mission Planner, который позволят настроить управление, проложить маршрут и т.д.
На плате установлен микроконтроллеры ATMega2560 и ATMega32U2 (8-битный, тактовая частота 16 MHz, FLASH-память 32кб, SRAM-память 1 кб), датчики MPU6000 и MS5611 (барометр).
Блок-схема системы управления показана на рисунке 21.

Рисунок 21 – Блок-схема системы управления.
В рассмотренной системе были выявлены следующее противоречие:
ТП17. При повышении гибкости управления контроллера недопустимо уменьшается универсальность использования контроллера.
ТП18. При повышении качества платы недопустимо повышается цена.
ТП19. При повышении гибкости управления контроллера недопустимо повышается сложность схемы подключения периферии.
Противоречия ТП17 и ТП18 были разрешены с помощью приёмов объединения, дешёвой замены, универсальности, путём создания универсального полётного контроллера.
На рисунке 22 показан этап эволюции.

Рисунок 22 – Седьмой этап эволюции.
8. Новое поколение.
Pixhawk – полетный контроллер нового поколения (рис. 23), дальнейшая разработка проекта PX4 и программного кода Ardupilot от 3DRobotics. В контроллере присутствует операционная система реального времени NuttX.
Контроллер поддерживает большое количество систем:
наземные, воздушные, наводные. Поддерживает различные модули и стандарты для их связи. Из-за своей универсальности и стал популярным. Поддерживает использование ПО Mission Planner как ArduPilot.

Рисунок 23 – Внешний вид контроллера Pixhawk
На плате установлен 32-битный микропроцессор STM32F427 Cortex M4 (168MHz, FLASH-память 2 Мб, RAM- память 256кб) и 32-битный сопроцессор STM32F103. Так же присутствуют датчики: ST Micro L3GD 20 – 3-осевой гироскоп, ST Micro LSM303D – 3-осевой акселерометр/магнитометр, MPU6000 — 3-осевой акселерометр/гироскоп, MEAS MS5611 – барометр.
Блок-схема системы управления показана на рисунке 24.

Рисунок 24 – Блок-схема системы управления.
Выявим противоречия описанной системы:
ТП20. При повышении гибкости управления аппарата недопустимо повышается сложность аппаратуры управления.
Противоречия ТП20 были разрешены с помощью приёмов объединения, универсальности, путём создания многофункционального БПЛА с открытым кодом для любительских разработок.
Этап эволюции представлен на рисунке 25.

Рисунок 25 – Восьмой этап эволюции.
9. Готовое решение.
В 2010 году французская фирма Parrot выпустила на рынок свой беспилотный летательный аппарат AR.Drone. Через пару лет была выпущена обновлённая версия Parrot AR.Drone 2.0 (рис. 29). Проект квадрокоптера был полностью открыт для идей пользователей, что помогло ему стать хитом.

Рисунок 29 – Внешний вид Parrot AR.Drone 2.0
Открытость проекта позволяет к готовому аппарату подключать дополнительные компоненты. Это была одна из привлекательных черт описываемого квадрокоптера. Также пользователи могли программировать его полётный контроллер, либо создавать различные приложения для управления на языках C, Java и Objectiv-C.
Примерная блок-схема управления представлена на рисунке 30.
Одна из главных проблем всех беспилотных летающих аппаратов заключается в том, что если во время режима автопилота перед ними возникнет препятствие (будь то стена, дерево, другой летающий аппарат или даже человек) столкновения не избежать. Максимум на что можно рассчитывать, что БПЛА попытается остановиться или оператор вовремя вмешается в процесс. Однако, если прогнозы развития верны и в ближайшее время нас ожидает дальнейшее развитие рынка беспилотных летательных аппаратов, эта проблема будет всё больше набирать актуальность.

Рисунок 30 – Блок-схема системы управления.
ТП21. При добавлении дополнительной аппаратуры, повышающей функционал автопилота, недопустимо повышается вес аппарата.
10. Дальнейшее развитие.
Дальнейшее развитие беспилотных систем, в том числе БПЛА, заключается во внедрении в систему управления искусственного интеллекта. Интеллектуальная система управления позволит ещё больше развить функции автопилота, автоматизировать беспилотные аппараты. При этом действия оператора сводятся только к подготовке аппарату к началу полёта и непосредственно к самому запуску.
Но возникает техническое противоречие ТП21. Это противоречие разрешается принципами объединения, универсальности, непрерывности полезного действия, «посредника».
Интеллектуальную систему управления можно реализовать на микропроцессорном компьютере (например, Raspberry Pi) с несколькими датчиками (2 видео камеры и лидар). Такая система при движении по заданному маршруту сможет определить появившееся препятствие, которым может быть человек, другой БПЛА или дерево, стена, которые не заметил оператор при составлении маршрута. Данная система будет распознавать объекты методом компьютерного зрения и определять вектор движения этих объектов. После определения вектора движения, система сравнит его с вектором БПЛА и построит маршрут уклонения с минимальным уходом с маршрута. Такая схема несильно повлияет свои весом на характеристики беспилотного летательного аппарата, но значительно повысит степень его «выживаемости».
Литература и примечания:
(дата обращения 14.11.2016 г.). – Заглавие с экрана.
(дата обращения 24.12.2016 г.). – Заглавие с экрана.
Теория и практика БПЛА, или как я учился в Школе дронов МАИ

Собственно, факт изучения и эксплуатации беспилотников в стенах МАИ не является секретом – было бы странно, если бы этим не занимались в подобном вузе. Изучение БПЛА различных видов и различного назначения присутствуют практически во всех образовательных программах учреждения, а в корпусе №24 на шестом этаже находятся мастерские Школы дронов, где «сумрачный маёвский гений» собирает невиданные раньше беспилотные аппараты.
За постпандемийным валом работы и прочими заботами всё недосуг было зайти познакомиться, но вот – ура – наконец-то выпадает свободная неделя, и для себя я решаю потратить ее на знакомство с беспилотной авиацией.
Бэкграунд по беспилотникам перед курсами у меня был околонулевой, только лишь летом, вновь заинтересовавшись темой, разобрался в нюансах регистрации БЛА в России и получения разрешения на полеты – и изложил в этой статье.
Я записался на двухдневный курс «Оператор дрона», он предполагает минимум теории и максимум летной практики. Это значит, что упор делается на полеты в симуляторе и реальные полеты. Цель заключалась именно в этом – максимально полетать на разных штуках, а потом, если повезет, посмотреть на сборочные мастерские.
После регистрации на курс со мной связались организаторы, подтвердили мое участие и сообщили, что в понедельник утром необходимо подойти на КПП-7 института.

День первый. Введение в дроны
Обучение начинается с брифинга: классификация дронов в общем виде, механика движения, основы управления.
Какие дроны вообще бывают? Если подразделять БПЛА по внешнему виду, то они бывают: самолетного типа, то есть с крылом, создающим подъемную силу, также бывают мультикоптерные (мультироторные) системы, построенные на схеме из двух и более винтов, еще есть беспилотные аэростаты и различные гибридные системы, наподобие конвертопланов. План обучения в Школе строится преимущественно вокруг мультироторных систем, если еще точнее — в основном с квадрокоптерами, то есть с аппаратами, имеющими винтомоторную группу (ВМГ) из четырех винтов.
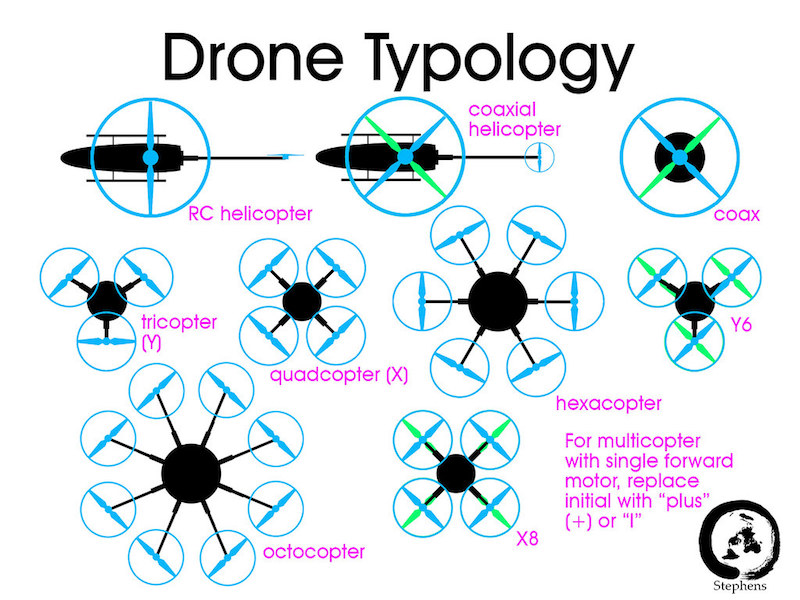
Виды роторных дронов
Принцип управления движением коптера прост — вращение пропеллеров создает тягу, с помощью которой управляется высота. Чем быстрее вращение пропеллеров, тем с большей скоростью машина набирает высоту. Вращение пропеллеров называется «газ» или «обороты». Обычно газ измеряется в процентах, где 0 — это полное отсутствие вращения, а 100 — максимальная загрузка моторов. Важное понятие здесь – это «газ висения», или тот уровень оборотов, при котором коптер зависает в воздухе, не набирая и не теряя высоту.
Движение по горизонтали и повороты достигаются изменением скорости вращения одного или двух винтов через пульт управления — ускоряя два расположенных рядом винта, оператор наклоняет машину и заставляет лететь в направлении, противоположном этим двум винтам.

Что касается разворотов вокруг своей оси, то тут механика следующая – все пропеллеры крутятся в противоположных направлениях, и вращение каждого винта создает реактивный крутящий момент, который старается повернуть дрон в сторону, противоположную вращению винта. В квадрокоптерах этот крутящий момент каждого из винтов уравновешивается другим. Всего в квадрокоптере два винта вращаются по часовой стрелке и два против. Но если увеличить обороты пары, вращающейся по часовой стрелке, и в равной мере уменьшить обороты у другой пары, нескомпенсированный реактивный момент вызовет вращение машины вокруг своей вертикальной оси.
В управлении есть несколько основных понятий для совершения полета:
Throttle (см. рисунок ниже) – это общий газ, с помощью движения левого стика вверх происходит увеличение оборотов пропеллеров, движение вниз уменьшает их. Соответственно изменению тяги происходит управление по высоте – при увеличении оборотов машина идет вверх, при уменьшении – вниз.

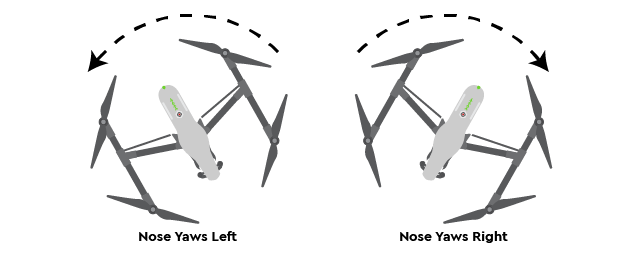
Yaw – это рысканье или вращение в горизонтальной плоскости. Отклонением левого стика влево оператор добивается поворота налево, отклонением левого стика вправо — поворота направо.
Pitch — это наклон дрона вперед или назад (тангаж). Тангаж определяет движение коптера вперед или назад. Поднятие правого стика на пульте вверх – и коптер летит вперед, опускание вниз — он летит назад.
Roll – это крен, движение вправо-влево по горизонтали. Управляется отклонением правого стика на пульте влево и вправо соответственно.

Пульт собственной персоной для лучшего понимания принципов управления. Фото с выезда на полигон в четвертый день обучения.
Общий газ, тангаж, рысканье и крен – из этих четырех вещей складывается управление квадрокоптером.

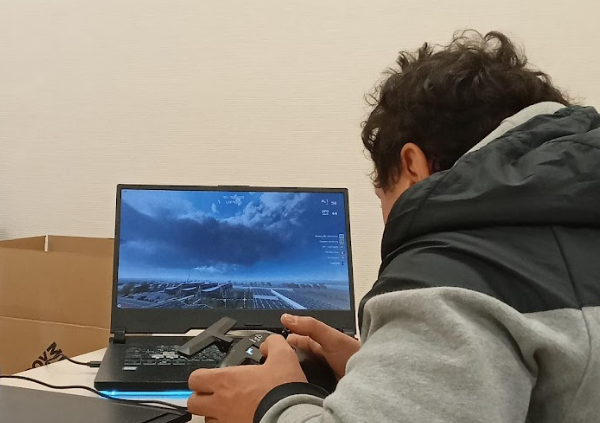
После короткого введения нас приглашают на симулятор. Похоже это на компьютерную игру: программа симулятора устанавливается на ноутбук, выбирается трасса полета, летательный аппарат, а курсант, управляя машиной на экране с помощью пульта, должен за минимальное время пройти все контрольные точки, не разбив при этом машину. С помощью таких симуляторов проводят первоначальную подготовку пилотов для дрон-рейсинга – гонок на FPV-беспилотниках.
На компьютере я летаю именно на квадрокоптере. Симулятор точно воспроизводит реальные характеристики пилотируемой модели. Также присутствует разрушаемость коптера – ударившись винтом о твердый предмет, программа имитирует повреждение пропеллера, и летные характеристики ухудшаются. При успешном прохождении трассы миссия завершается, при повреждении дрона до полной потери летных качеств – начинается заново. У моей модели отсутствовали вспомогательные системы типа корректировки положения по GPS или удержания высоты по барометру, так что я, новичок в деле управления, бездарно разбил дрон десяток-другой раз, прежде чем освоиться и начать сносно держаться в воздухе.
Поскольку, кроме общих принципов и базовых движений стиками пульта, до нас ничего не доводят, переход к симулятору сродни прыжку в холодную воду. Сделано это, надо думать, чтобы обучающийся сразу пытался «почувствовать» коптер, интуитивно научиться управлять им. Надо признать, такая тактика приносит результат, но применять ее надо именно с симулятором, потому что никаких реальных дронов не нее не хватит.
Коллега-курсант за пультом управления
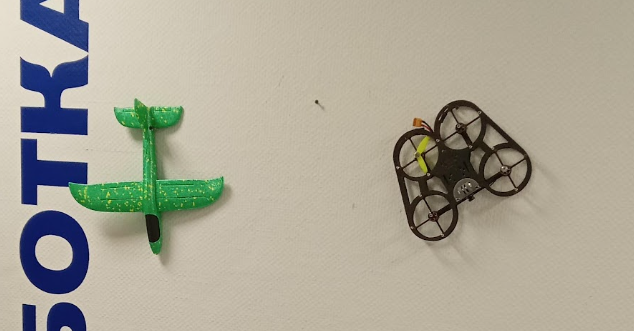
Во время занятий обязательно делать перерывы. Отдыхая от летной практики, можно рассмотреть разложенные вокруг беспилотники – серийные и самодельные.

Слева направо: DJI Phantom, DJI Mavic 2 и какой-то самодельный аппарат

Инструктор демонстрирует квадрокоптер оригинальной конструкции, предназначенный для дрон-рейсинга. Максимальная скорость полета — до 200 км/ч
Долго разглядывать творческий беспорядок у меня не получилось. Следующее упражнение – полеты на Tiny Whoop. Это особый тип квадрокоптеров маленького размера с закрытыми винтами, они используются для тренировки мастерства полетов в условиях ограниченного пространства.

Tiny Whoop, еще такие называют «тиниками»
Конструкция безопасна. Закрытые пластиковыми кольцами винты и малая масса минимизируют риски травм у присутствующих и разрушений в «комнате полетов». Удержать такой аппарат в воздухе сложнее, чем кажется. Прежде чем минимально освоиться, я влетаю во всё подряд с десяток-другой раз.

У квадрокоптеров время полета ограничено емкостью аккумулятора, соответственно, чем меньше аккумулятор, тем меньше времени он может летать. У выданного мне «тиника» небольшая батарея, всего 380 миллиампер, и через 5 минут мощности для создания винтами необходимой подъемной силы уже не хватает – и я веду дрон на посадку.
Ну, зато этих аккумуляторов много, и после замены можно снова подниматься в воздух.
Первое летное задание для новичков – взлететь на дроне и держать его неподвижно, корректируя положение стиками на пульте управления. «Тиник» имеет минимум вспомогательных систем, из-за чего без ручного управления так и норовит дрейфовать по всей комнате.
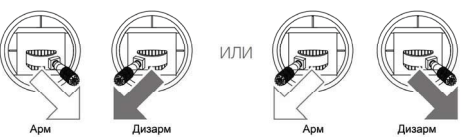
Путем проб и ошибок выработана определенная схема успешного выполнения задания, ха-ха. После арма требуется медленно перемещать левый стик вверх до тех пор, пока дрон не наберет желаемую высоту. После набора надо удержать его в неподвижном состоянии, а для этого тот же левый стик перемещаем вниз очень плавно, в противном случае тиник продолжит набор высоты. В итоге, чтобы «поймать» тиник, потребуется совершить несколько движений левым стиком вверх-вниз. Параллельно с корректировкой по высоте необходимо следить за креном и удерживать направление «по носу». Главная фича – в течение всех упражнений не допускать никаких резких движений стиками, это залог успеха.
Следующее задание сложнее – управлять дроном, повернув его к себе «лицом». Управление по направлению движением в этом случае инвертируется, и оператор должен иметь определенные рефлексы в такой ситуации.
Третье задание – полет по квадрату. Курсант должен дроном пролететь по квадрату, удерживая высоту и курс вперёд, то есть постоянно разворачивать коптер «носом» по курсу движения. Здесь также необходимо помнить о постоянной работе левым стиком вверх-вниз для удержания высоты. Это становится более сложным, поскольку мозг занят еще и обрабатыванием поворотов коптера в углах квадрата. Однако это необходимое упражнение, и после его освоения дело пойдет легче.
После полетов на маленьком квадрокоптере наступило время перерыва.

Тематический стрит-арт на стене корпуса
Некоторые охотники вешают свои трофеи на стену. Здесь, видимо, действует такая же практика для побежденных в дрон-рейсинге БПЛА.
Вообще, над Москвой летать нельзя, и беспилотникам в том числе. Но МАИ – авиационный вуз, и на территории разрешены полеты для испытания техники на высоте до 60 метров.
Сегодня мы летаем на DJI Mavic 2, все впервые. Перед полетом на открытом воздухе требуется провести предполетную подготовку: наметить маршрут полетов, обратить внимание на скопления людей, воздушные линии проводов, высокие деревья, ознакомиться с прогнозом погоды, в том числе с облачностью на разных высотах и так далее. В этот раз подготовку проводит инструктор.
Для начала нам включают режим Tripod, в некоторых моделях он называется Cinematic. Этот режим предназначен для видеосъемки, в нём коптер движется максимально плавно, медленно разворачиваясь и развивая небольшую скорость. Поскольку все летают первый раз, этот режим наиболее безопасен и помогает неспешно освоиться с управлением.

Поднимаю Мавик в воздух
После того как все освоились, переходим на режим Position. В нем коптер действует быстрее, чем в режиме Tripod, и полеты становятся динамичнее.
Вообще, продукция DJI стоит недешево; так, сейчас за Mavic 3 московские магазины просят от 220 до 300 тысяч, в зависимости от комплектации. Поэтому я, когда думал о покупке хорошего дрона для съемки, планировал сначала купить какой-нибудь китайский, чтобы отрабатывать пилотирование на том, чего не жалко. Разбить «птичку» стоимостью в 300к из-за собственной неопытности – удовольствие ниже среднего.
На практике же оказалось, что Мавик весьма лоялен к неопытному оператору и прощает ошибки в пилотировании. На борту у дрона есть направленные в разные стороны лидары, которые предупредят пилота о близком препятствии и в случае необходимости коптер зависнет на одном месте самостоятельно. Также, различные системы стабилизации делают управление дроном предсказуемым и послушным, он автоматически корректирует свое положение по GPS и барометру, а в случае поворота или остановки инерция автоматически гасится – в полете видно, как дрон оттормаживается при маневрах. Проще говоря, такой квадрокоптер не надо «ловить» при движении, автоматика всё сделает сама. Также в наличии кнопка возврата домой и режим возврата при низком заряде батареи.

При этом нельзя сказать, что этот коптер невозможно разбить. Есть определенные условия, при которых бортовые лидары не увидят препятствие, ещё на полет могут повлиять антенны сотовой связи и так далее. К примеру, висящие в воздухе провода системы безопасности не увидят практически наверняка. При всей продвинутости систем безопасности БПЛА первичная подготовка оператора необходима.

Селфи с Мавика под конец занятий
Время до вечера пролетело незаметно. После занятий мне любезно предоставили возможность дополнительно полетать на «тинике» с очками FPV и дали посмотреть на мастерские Школы дронов.

Здесь собираются модели

Всё это летает. Некоторые детали проектируются самостоятельно и печатаются на 3D-принтерах (внизу слева)

Одно из рабочих мест мастерской

Радиоуправляемая модель с двигателем внутреннего сгорания. Размах крыльев примерно в рост человека
Параллельно с моим двухдневным курсом обучение проходили группы по пяти- и десятидневным программам. В процессе прогулки по корпусу я поинтересовался деталями, и оказалось, что их учебный план, помимо широкой теоретической части, также включает выездную летную практику. Против такого «козыря» я устоять не смог и договорился о своем переводе с двухдневного курса на пятидневный. Со следующего дня я пошел на занятия в другую группу.
День второй. Базовая аэродинамика, лидары, устройство БПЛА и документы на полет
Придя на следующий день в аудиторию, я глянул у своих новых одногруппников вчерашние конспекты. По существу, ничего серьезного я не пропустил. Поскольку курс рассчитан на подготовку с нуля, то первый день теории был посвящен самой базе: типы БПЛА, возможные цели применения, регистрация беспилотника в Росавиации, вот это вот всё.

Второй день отведен под более конкретные вещи. Мы рассматриваем базовые понятия аэродинамики, внутреннее устройство беспилотников (а вы знаете, что такое БАНО?), их возможную полезную нагрузку, а после обеда учимся пользоваться fpln.ru и детально штудируем схему получения разрешения на вылет. Последнее я разбирал в предыдущей статье про БПЛА и полным нулем в предмете не был, тем не менее большой ценностью были разборы получения разрешений на ИВП на примере реальных кейсов.
Не стоит даже пытаться описать в деталях все аспекты, которые были разобраны в этот день, но стоит подробнее остановиться на одном вопросе безопасности.
Одним из видов полезной нагрузки БПЛА является система лидаров (или система визуального позиционирования), которая позволяет машине поддерживать текущее положение и избегать столкновений. Летая на дронах, оснащенных такой системой, легко поддаться ложному чувству защищенности. Может показаться, что машина не допустит столкновения с чем-либо даже при грубейших ошибках в пилотировании и всегда вовремя считает препятствие и остановится.

Направленная вверх пара лидаров на DJI Air 2S, dji.com
То, что это далеко не так, уже было упомянуто инструктором на первом дне перед началом полетов на Мавике, но здесь мы остановились подробнее. Итак, системы предупреждения столкновений могут не сработать в следующих ситуациях:
Отдельным вызовом был построчный разбор содержания полетного плана, который надлежит подавать в центр ОрВД для получения разрешения на полет. Писать его вручную сродни ручному переписыванию IPv6 адресов, и я всегда думал, что все составляют его через программы, но, видимо, нет. Выглядит он так:

К концу дня каждый из курсантов знает значение каждой строки в плане и может вручную написать план полетов под себя, вместе с остальным пакетом документов на использование воздушного пространства.
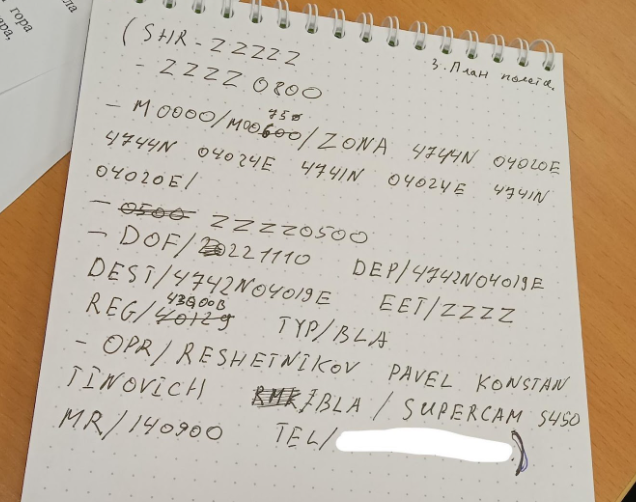
Одна из моих попыток составить план по заданным условиям. Почти правильный!
За писаниной конспектов и самостоятельных работ незаметно пролетел второй день. Оглядываясь назад могу сказать, что он был самым скучным из моих пяти, но необходимым, особенно для тех, кто пришел не просто глазами похлопать (как я), а в интересах бизнеса. Многие компании сейчас осваивают использование беспилотников в своих отраслях и специально отправляют сотрудников на подобные курсы. Таких курсантов видно сразу – каждое слово преподавателя тщательно заносят «в протокол».
День третий. Аэрофотосъемка
Третий день в программе был последним отведенным на теорию. Следующие два – только практические полеты, так что на учебу с утра я еду с большим нетерпением. Побыстрее бы с теорией отстреляться, а там уже полеты!
Ключевые темы дня – построение ортофотопланов и 3D-моделей местности с помощью БПЛА. Ортофотоплан, если вкратце, это фотографический план местности, созданный с помощью аэрофотосъемки с беспилотника. БПЛА летит над землей на заданной высоте по определенному маршруту, который заложен в автопилот, и фотографирует поверхность, а получившиеся снимки группируются и «сшиваются» между собой. Такой фотографический план обладает большой точностью и детализацией, и используется в сельском хозяйстве, строительстве, при составлении кадастровых карт и так далее.
Исходные фото для составления ортофотоплана
Составление 3D-модели местности позволяет получить реалистичную трехмерную копию объекта с учетом рельефа, что особенно ценно в маркшейдерском деле. Маркшейдеров у меня в группе не было, но зато было аж два геодезиста 😀
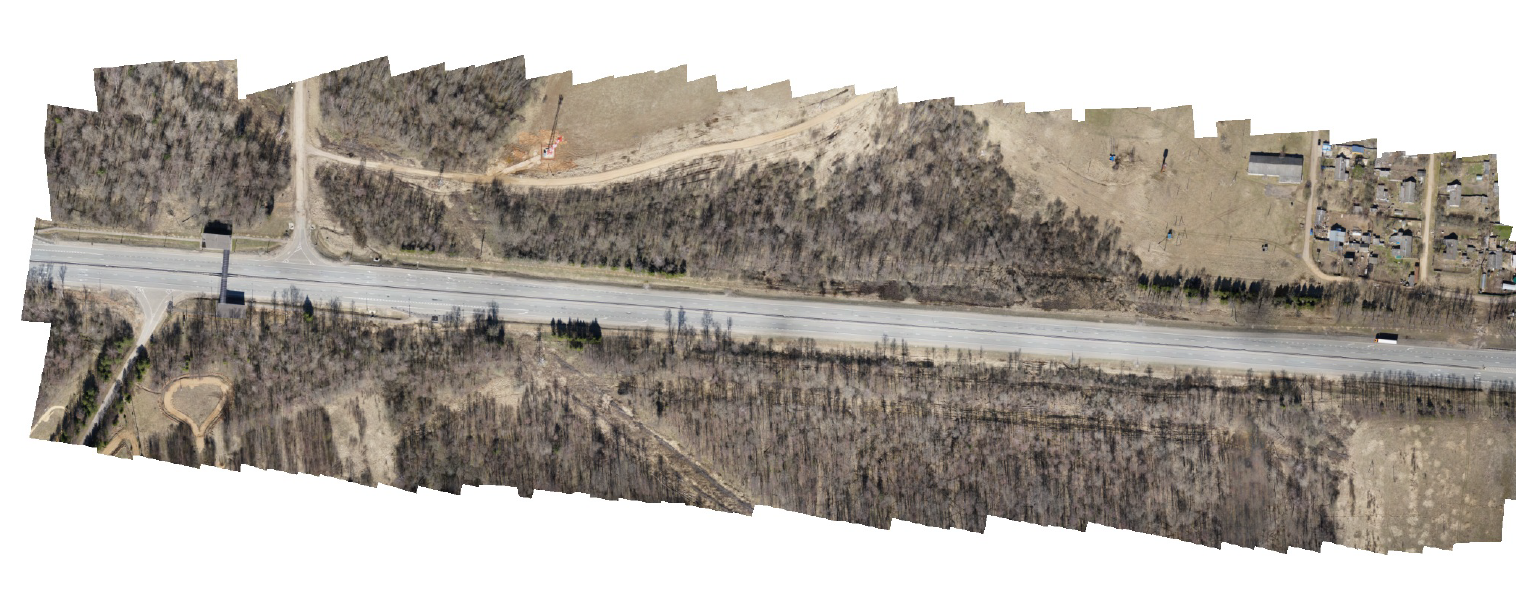
Как выглядит мой ортофотоплан
И ортофотопланы, и 3D модели создаются вручную. Их составление – навык, который требует наработки.
Главный враг в аэрофотосъемке – несовпадение объектов на фотографии с реальностью. Например, предметы, в реальности абсолютно прямые, на снимке выглядят немного «волнистыми». Выглядит забавно, но это ошибка, за которую иногда приходится всё перелётывать по-новой.
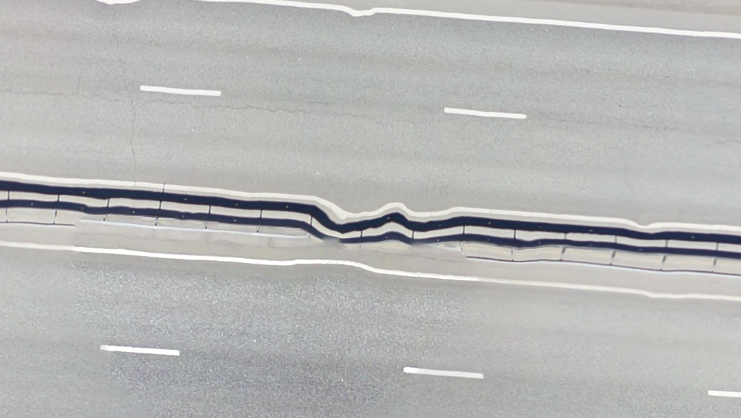
Такие ошибки могут возникнуть как из-за небрежно скомпонованных исходных снимков, так и из-за неправильного полета дрона. Значение может иметь даже дисторсия камеры.

Фура на обочине. Вроде ровная.
На выходе у меня получаются модели сносного качества, но до идеала еще сильно далеко. Кстати, файлы ортофотопланов очень тяжелые, мой получился около 2 Гб.

, (1876 – 1879)")



